
Les véhicules modernes sont gourmands en données. Des dizaines de modules de commande reçoivent des données d’entrée provenant d’une multitude de capteurs répartis dans le véhicule, le groupe motopropulseur et d’autres systèmes. Ces données sont ensuite utilisées pour déterminer la quantité d’accélération nécessaire, le moment où le système ABS doit intervenir, le moment où une roue perd de l’adhérence, etc.
On dit que les véhicules ont un système immunitaire, et je dirais que c’est en partie vrai. Les unités de contrôle ont une façon d’apprendre ou de s’adapter au conducteur et à ses tendances. Ils peuvent également s’adapter à certains composants à mesure qu’ils s’usent avec le temps, tels que les packs d’embrayage à l’intérieur d’une transmission automatique. Pour ce faire, ils analysent chaque entrée de données, puis comparent ces données aux valeurs minimales et maximales préprogrammées par l’OEM.
Cet apprentissage progressif est communément appelé adaptation, et il se déroule de manière transparente en arrière-plan. Mais, si un composant est reconstruit ou remplacé, vous devrez peut-être redémarrer ces adaptations pour que le système fonctionne au mieux. Examinons cinq adaptations courantes pour les modèles récents de BMW et ce que vous devez savoir avant de commencer une réparation.
#1: Capteur de position de vilebrequin
BMW fait référence à son unité de commande du moteur sous le nom de Digital Motor Electrics (DME). Le DME est chargé de surveiller et de contrôler tous les composants électriques qui permettent au moteur de fonctionner. Le DME surveille les données d’une multitude de capteurs, notamment le capteur de débit d’air massique (MAF), le capteur de position de vilebrequin (CKP), le ou les capteurs de position d’arbre à cames (CMP), etc.
Concentrons notre attention sur le CKP. Le CKP est utilisé pour déterminer la position exacte du vilebrequin lors de sa rotation. Il y a quelques décennies à peine, l’ECU se tournait vers le CKP uniquement pour savoir quand le cylindre n ° 1 était au PMH. De nos jours, le CKP peut indiquer à l’ECU où se trouve le vilebrequin avec une précision beaucoup plus grande. Ces données sont utilisées pour affecter le calage variable des soupapes (communément appelé VANOS).
Grâce à la précision du CKP, VANOS peut être utilisé pour maximiser la puissance, le couple, la réponse de l’accélérateur et éliminer le besoin d’un système de recirculation des gaz d’échappement (EGR). Le CKP peut également être utilisé pour détecter les ratés d’allumage immédiatement au démarrage, provoquant le stockage d’un code P0316 dans la mémoire DME.
Maintenant que nous en savons un peu plus sur le CKP et ce qu’il fait, parlons des adaptations. Les adaptations pour le CKP doivent être effacées du DME chaque fois que les réparations suivantes sont effectuées :
- Remplacement du CKP ;
- Remplacement de la roue du capteur incrémental sur le vilebrequin ;
- Remplacement du vilebrequin ;
- Remplacement du carter (bloc) avec des pistons ; et
- Remplacement de l’ensemble moteur.
Si l’une de ces réparations est effectuée, mais que les adaptations CKP ne sont pas effacées, cela pourrait amener le DME à calculer un déséquilibre des cylindres. Cela entraînerait des fluctuations de ralenti, un calage du moteur, une réponse retardée de l’accélérateur, etc. Dans de nombreuses applications, l’adaptation incrémentale de la roue ne peut pas simplement être effacée, le module doit être programmé. Assurez-vous de vérifier les informations de service OEM avant de commencer une telle réparation. Référence TSB SI B11 02 15 pour plus d’informations.
#2 : Capteur MAF
Le capteur de débit d’air massique (MAF) est utilisé pour déterminer la quantité d’air entrant dans la chambre de combustion. Le DME compare ensuite la lecture des capteurs d’oxygène pour déterminer dans quelle mesure le mélange air / carburant brûle. Un capteur MAF défectueux peut amener le DME à fausser le mélange de carburant, mais les MAF ne tombent généralement pas en panne du jour au lendemain. Ils s’usent lentement avec le temps.
Le DME est capable de gérer cette dégradation progressive et de s’y adapter. Il existe d’autres adaptations qui sont affectées par le MAF: les garnitures de carburant à court et à long terme. Lorsque ces valeurs sont excessivement positives, elles indiquent une condition maigre. Lorsqu’ils sont excessivement négatifs, ils indiquent un état riche. Dans la plupart des cas, vous devrez effacer les adaptations DME chaque fois que vous remplacerez le capteur MAF, ou après avoir réparé un problème qui a contribué à une condition excessivement riche ou maigre.
#3 : DME/injecteurs de carburant
Si vous remplacez le DME, vous devrez peut-être effectuer d’autres étapes de programmation. Selon l’application, vous pouvez être amené à effectuer une procédure de compensation de la quantité injectée. Cette procédure aide le DME à déterminer exactement la quantité de carburant que chaque injecteur pourra injecter dans chaque cylindre. Si vous ignorez cette procédure, le moteur risque de tourner brusquement, de caler ou de ne pas démarrer après la réparation.
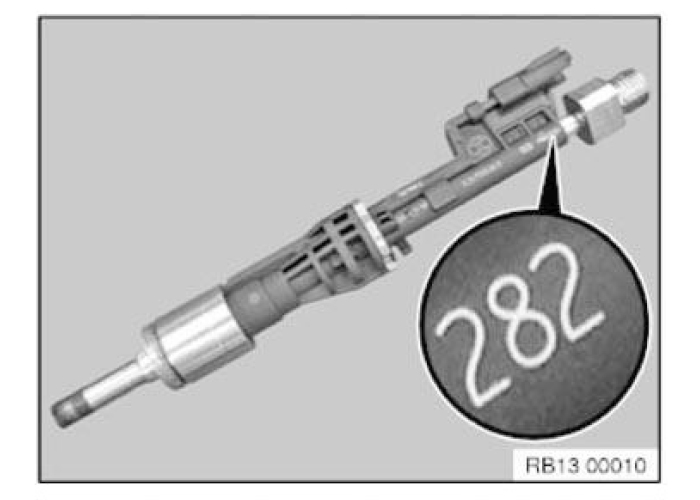
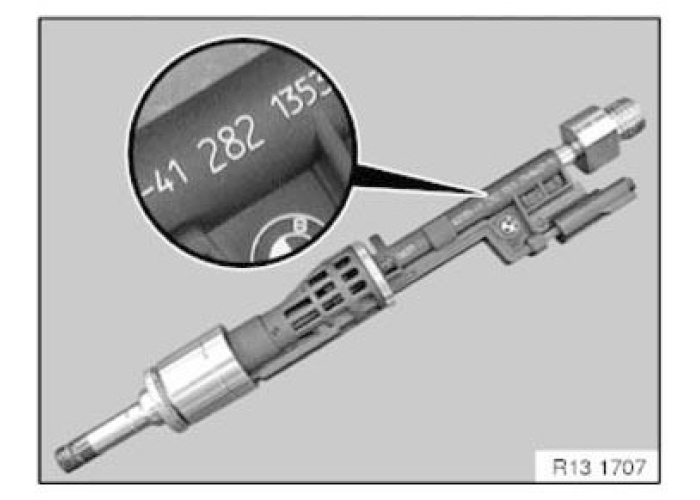
La valeur de réglage est imprimée à trois chiffres sur le corps de chaque injecteur de carburant. Ces valeurs doivent être stockées dans le nouveau DME. À l’aide d’un outil d’analyse capable de contrôle bidirectionnel, procédez comme suit :
- Sélectionnez « Sélection de fonction »
- Sélectionnez « Fonctions de service »
- Sélectionnez « Electronique moteur »
- Sélectionnez « Fonction de réglage »
- Sélectionnez « Régler les injecteurs »
- Sélectionnez « Plan de test »
- Saisir la vanne de réglage pour chaque injecteur
#4 : Transmission, corps de papillon, adaptations du capteur de position de la pédale d’accélérateur
Que vous travailliez sur un SMG ou une transmission automatique, l’unité de commande de transmission (TCU) utilisera des entrées de données pour contrôler le temps de changement de vitesse, la sensation, etc. En surveillant la vitesse du moteur, ainsi que les signaux de vitesse d’entrée et de sortie de la transmission, le TCU peut déterminer avec précision le taux de glissement et le temps de glissement pendant chaque changement de vitesse. Le taux de glissement et le temps de glissement sont tous deux influencés par les tolérances de fabrication et par le vieillissement des composants au fil du temps.
Le TCU examinera également les données du capteur du capteur de position du corps de papillon et du capteur de position de la pédale d’accélérateur pour déterminer la puissance demandée par le conducteur par rapport à la puissance fournie par le moteur. Cela aura un impact sur le rapport requis, le moment et la sensation de changement de vitesse, etc.
Ainsi, chaque fois que l’un de ces capteurs est remplacé, ou si la transmission a été entretenue, reconstruite ou remplacée, les adaptations peuvent devoir être effacées de la mémoire du TCU. Cela peut inclure l’initialisation de la position « 0 » de la pédale d’accélérateur, l’initialisation de la position de ralenti, le point d’engagement de l’embrayage, pour n’en nommer que quelques-uns. Ces procédures peuvent varier considérablement d’un modèle à l’autre, alors assurez-vous de vérifier les informations de service OEM.
#5 : Capteur d’angle de braquage et position d’arrêt final
Les systèmes de direction et de suspension BMW sont complexes et se composent d’une variété de composants interdépendants. Une géométrie d’alignement incorrecte ou une lecture défectueuse du capteur peut avoir un effet négatif sur le fonctionnement du régulateur de vitesse adaptatif, du contrôle électronique de stabilité, du contrôle électronique de la traction, de la direction à rapport variable, sans parler de l’usure des pneus.

Le capteur d’angle de braquage et les positions de butée sont deux adaptations critiques qui doivent être prises en compte lors de l’entretien du système de direction ou de suspension d’un modèle BMW récent. Le capteur d’angle de braquage est utilisé pour déterminer de combien le conducteur tourne le volant. Les positions de fin de course sont des points d’arrêt programmés qui réduisent l’effort d’assistance à la direction une fois que l’appareil à gouverner approche de ses points d’arrêt mécaniques. Cela réduit le risque d’usure ou de rupture des composants de direction si la roue est maintenue contre la butée.
Dans la plupart des cas, le capteur d’angle de braquage doit être calibré chaque fois qu’un alignement est effectué ou que le capteur est retiré, déconnecté ou remplacé. Les positions de fin de course doivent être programmées après le remplacement de l’appareil à gouverner ou le remplacement ou la programmation de l’unité de commande.
Veuillez noter:
Chaque fois que nous parlons de clignoter ou de programmer un module de contrôle, il y a place à l’erreur. Il y a quelques points dont vous devez vous méfier avant de commencer ce type de procédure.
Si la tension de la batterie tombe en dessous d’un certain niveau pendant la programmation, la session se terminera avant la fin. La tension de la batterie est absolument essentielle au processus et ne doit pas descendre en dessous de 13,0 V pendant le processus de programmation. Connectez un chargeur de batterie avant de commencer la procédure de programmation, et il est recommandé d’utiliser uniquement les chargeurs de batterie recommandés par BMW.
Les modules de contrôle programmables par flash peuvent être programmés jusqu’à 13 fois seulement. Les sessions de programmation restantes seront généralement affichées quelque part sur l’écran pendant la procédure de programmation. Selon le niveau des données de programmation, la procédure peut prendre de 2 à 15 minutes.
Après la programmation, effacez les valeurs d’adaptation du module de commande. Le logiciel de programmation devrait automatiquement fournir des instructions sur la façon de procéder. L’effacement des valeurs d’adaptation se trouve également dans le menu Fonctions de service. Le module de commande se réadaptera rapidement au système en stockant de nouvelles valeurs lors de votre essai routier après réparation.
La procédure de programmation peut amener d’autres modules de contrôle d’interfaçage (AGS, ASC, etc.) à mémoriser des défauts erronés. Une fois la programmation effectuée
terminé, effectuez une analyse du système pour déterminer si de nouveaux codes d’erreur ont été enregistrés. Effacez toutes les mémoires de défauts du module de commande du véhicule pour éviter tout diagnostic ultérieur inutile.
Enfin : vous ne devez pas programmer un module pour corriger un problème, sauf indication contraire dans un TSB applicable ou dans les informations de service pour la réparation que vous effectuez. La programmation ou l’adaptation d’un module de contrôle n’est pas une « solution universelle ».